Kinect for Windows SDK 2.0 では顔認識に関しては次のように定義されています。
| Kinect for Windows SDK 2.0 の Kinect.Face.h(抜粋) |
|---|
enum _FacePointType {
FacePointType_None= -1,
FacePointType_EyeLeft= 0,
FacePointType_EyeRight= 1,
FacePointType_Nose= 2,
FacePointType_MouthCornerLeft= 3,
FacePointType_MouthCornerRight= 4,
FacePointType_Count= ( FacePointType_MouthCornerRight + 1 )
};
enum _FaceProperty {
FaceProperty_Happy= 0,
FaceProperty_Engaged= 1,
FaceProperty_WearingGlasses= 2,
FaceProperty_LeftEyeClosed= 3,
FaceProperty_RightEyeClosed= 4,
FaceProperty_MouthOpen= 5,
FaceProperty_MouthMoved= 6,
FaceProperty_LookingAway= 7,
FaceProperty_Count= ( FaceProperty_LookingAway + 1 )
};
|
| Kinect for Windows SDK 2.0 の Kinect.h(抜粋) |
|---|
enum _DetectionResult {
DetectionResult_Unknown= 0,
DetectionResult_No= 1,
DetectionResult_Maybe= 2,
DetectionResult_Yes= 3
};
|
| Kinect for Windows SDK 2.0 の Kinect.h(抜粋) |
|---|
typedef struct _PointF {
float X;
float Y;
} PointF;
|
USE_FACE 定数を define してから NtKinect.h を include する と NtKinect の顔認識関係のメソッドや変数が有効になります。
setSkeleton() 関数を呼び出して 骨格情報を取得した後に、setFace()メソッドを呼び出して顔を認識することができます。
| 返り値の型 | メソッド名 | 説明 | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| void | setFace() | version1.2以前。 setSkeleton()を呼び出した後に呼び出して顔認識をすることができる。 次のメンバ変数に値が設定される。
|
|||||||||||||||
| void | setFace(bool isColorSpace = true) | version1.3以降。 setSkeleton()を呼び出した後に呼び出して顔認識をすることができる。 次のメンバ変数に値が設定される。
第1引数をfalseで呼び出した場合はDepthSpace座標系における位置が変数にセットされる。 |
| 型 | 変数名 | 説明 |
|---|---|---|
| vector<vector<PointF>> | facePoint | 顔の部品の位置。 一人の人間の「左目、右目、鼻、口の左端、口の右端」の位置が vector<PointF> であり、 複数の人間を扱うため vector<vector<PointF>> となる。 (version1.2以前)ColorSpace 座標系における位置である。 (version1.3以降)ColorSpace座標系またはDepthSpace座標系における位置である。 |
| vector<cv::Rect> | faceRect | 顔の矩形領域のベクタ。 (version 1.2以前)ColorSpace 座標系における位置である。 (version1.3以降)ColorSpace座標系またはDepthSpace座標系における位置である。 |
| vector<cv::Vec3f> | faceDirection | 顔の向き (pitch, yaw, roll) のベクタ |
| vector<vector<DetectionResult>> | faceProperty | 顔の状態。 一人の人間の「笑顔、正面、眼鏡、左目閉じる、右目閉じる、口が開く、口が動く、目をそらす」が vector<DetectionResult> であり、 複数の人間を扱うため vector<vector<DetectionResult>> となる。 |
| vector<UINT64> | faceTrackingId |
version 1.4 以降で利用できる。 trackingIDのベクタ。 顔情報 faceRect[index ] などに対応する trackingIdは faceTrackingId[index ] です。 |
骨格認識されたすべての人間の顔が認識されるとは限りません。 「ある骨格が笑顔であるかどうか」など skeleton と face の対応を取りたい場合は、 skeletonTrackingId[i] と faceTrackingId[j] が一致するかどうかで判定できます(version1.4以降)。 version1.3以前のNtKinectをお使いの場合は、 骨格認識で得た顔の位置 kinect.skeleton[i][JointType_Head] が、顔認識で得られた顔の矩形領域 kinect.faceRect[j] の範囲内にあるかどうかで判定して下さい。
ソリューションエクスプローラのプロジェクト名の上で右クリックしてメニューからプロパティを選択します。

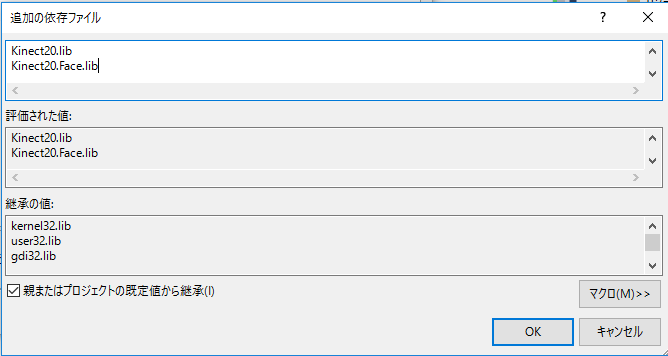
「構成プロパティ」の「リンカー」の「入力」の「追加の依存ファイル」を選択して、「編集」を選びます。

Kinect20.Face.libを追加します。
xcopy "$(KINECTSDK20_DIR)Redist\Face\x64" "$(OutDir)" /e /y /i /r

NtKinect.h をinclude するよりも前に USE_FACE 定数をdefineして下さい。
kinect.setSkeleton()メソッドを呼び出します。 プログラム例では kinect.skeleton を表示していますが、表示をする部分は省略しても構いません。 顔認識の前に kinect.setSkeleton()メソッドを呼び出して骨格認識をしておくことが重要です。
setFace()メソッドを呼び出します。 kinect.faceRect, kinect.facePoint, kinect.faceProperty, kinect.faceDirection の値が設定されるので 必要に応じて表示します。
| main.cpp |
#include <iostream> #include <sstream> #define USE_FACE #include "NtKinect.h" using namespace std; void doJob() { NtKinect kinect; while (1) { kinect.setRGB(); kinect.setSkeleton(); for (auto person : kinect.skeleton) { for (auto joint : person) { if (joint.TrackingState == TrackingState_NotTracked) continue; ColorSpacePoint cp; kinect.coordinateMapper->MapCameraPointToColorSpace(joint.Position,&cp); cv::rectangle(kinect.rgbImage, cv::Rect((int)cp.X-5, (int)cp.Y-5,10,10), cv::Scalar(0,0,255),2); } } kinect.setFace(); for (cv::Rect r : kinect.faceRect) { cv::rectangle(kinect.rgbImage, r, cv::Scalar(255, 255, 0), 2); } for (vector<PointF> vf : kinect.facePoint) { for (PointF p : vf) { cv::rectangle(kinect.rgbImage, cv::Rect((int)p.X-3, (int)p.Y-3, 6, 6), cv::Scalar(0, 255, 255), 2); } } cv::imshow("rgb", kinect.rgbImage); auto key = cv::waitKey(1); if (key == 'q') break; } cv::destroyAllWindows(); } int main(int argc, char** argv) { try { doJob(); } catch (exception &ex) { cout << ex.what() << endl; string s; cin >> s; } return 0; } |
RGB画像の上に、認識された顔情報が表示されます。
この例では、顔の矩形領域をシアン色の四角形で表示し、 また顔の部品(左目、右目、鼻、口の左端、口の右端)の 位置に黄色の四角形を書いています。

上記のzipファイルには必ずしも最新の NtKinect.h が含まれていない場合があるので、 こちらから最新版をダウンロードして 差し替えてお使い下さい。